
梯度下降法与牛顿法是求解最小值/优化问题的两种经典算法。本文的目标是介绍两种算法的推导思路与流程,并且从初学者的角度就一些容易混淆的话题如 梯度下降法(gradient descent)与最速下降法(steepest descent)的联系与区别、牛顿求根迭代方法(Newton–Raphson method) 与牛顿法求解最小值算法的联系(来自 Andrew Ng 机器学习课程第四讲)进行说明。本文的内容将对高斯牛顿法(Gauss–Newton algorithm) ,Levenberg-Marquardt算法(LM算法)等非线性最小二乘问题解法起到引出作用。
1.梯度下降法
已知多元函数 \(f(x_1,x_2,\dots,x_n)\) 在定义域上可微,如果将\(f(\mathbf{x})\)在\(\mathbf{x}\)处一阶泰勒展开(tayler expansion),可得到:(说明:为了编辑方便下文中统一以 \(x={\begin{bmatrix}
x_1,x_2,\dots,x_n
\end{bmatrix}}^T\) 代替 \(\mathbf{x}\) )。$$f(x+\epsilon) = f(x)+\epsilon ^T\nabla_x f + O(||\epsilon||)\approx f(x)+\epsilon ^T\nabla_x f $$其中\(\nabla_x f ={\begin{bmatrix}
\frac{\partial f}{\partial x_1},\dots,\frac{\partial f}{\partial x_n}
\end{bmatrix}}^T \)为 \(f\)在\(x\)处的梯度向量。
这个式子我们可以解读为当 \(x\)增加 \(\epsilon\)时,\(f(x)\)增加\(\epsilon ^T\nabla_x f\),即\(\epsilon\)与梯度\(\nabla_x f\)的內积。如果我们限定\(\epsilon\)的模长为定值,其方向怎样才能获得\(f(x+\epsilon) \)的最小值呢?答案当然是与\(\nabla_x f\)方向相反的时候,此时\(\epsilon ^T\nabla_x f\)获得最小值。
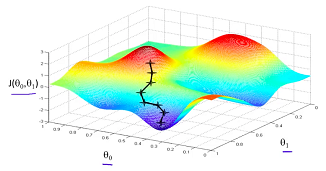
我们也可以利用直觉上较好理解的爬山的例子来解释梯度下降法。假设你位于山上某一点坐标为\(\mathbf{\theta}(\theta _1,\theta _2)\),那么在此处(注意,是在这一点)下山最快的方向当然是沿着此处的梯度方向。
所以说,将整个故事串起来,梯度下降法的思路可以总结如下:欲求多元函数\(f(x)\) 的最小值,可以采用如下步骤:
- 给定初始值\(x_0\)。
- 按照如下方式“下山”:\(x_{i+1} = x_i-\eta\nabla_{x_i} f\) 。其中\(\eta>0\),在机器学习领域,\(\eta\)也被称之为学习率(learning rate)。
- 直到\(x\) 满足收敛条件为止。如\(\|f(x_{i+1}) – f(x_i)\|<\epsilon\)或\(||\nabla_{x_i}f||\approx 0\)。
学习率的重要性:
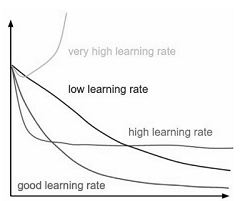
学习率作为控制下降步长的参数,影响函数下降的速度。学习率是我们根据经验确定的一个参数,因此在机器学习领域中这样的参数也被成为超参数(hyperparameter)。学习率的选取不能过大或者过小,如下图,不同的学习率导致函数不同的收敛速度,甚至可能导致函数不收敛。
1.1 梯度下降法的优势
1.时间复杂度低,在每一个迭代中,只需要计算梯度,不需要对二阶导数矩阵(即海森矩阵(Hessian Matrix))进行计算。
2.空间复杂度低,因为梯度向量为一个\(n\times 1\)的向量,比起Hessian Matrix来,占用存储空间小n倍。在实际应用中,\(\mathbf{x}\)的维度可能非常高。
1.2梯度下降法的局限
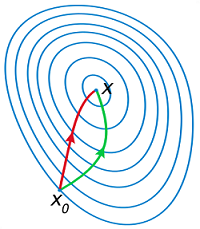
对于部分求解函数,梯度下降法可能会出现下降非常缓慢的情形。其收敛速度也较其他方法低(其他文献分析其收敛速度为线性,本文不作推导)。如下图,梯度下降法的路径出现了z字型。
究其原因,我认为,某一点的梯度只能作为这一点的一个极小的领域处的最快下降方向,一旦梯度变化较快,梯度下降法会出现因为学习率不合适而出现”zigzag”现象。而且,如果我们将梯度下降法与下文的牛顿法做对比,你会发现,一直沿着梯度方向下降的速度不一定是最快的。如下图:
1.3 最速下降法(steepest decent) 与 梯度下降法(gradient descent)的联系
总结一下就是 梯度下降法是最速下降法的一种特例。在最速下降法中,对于某一范数下\(epsilon\)的取值根据以下原则:
\(\bigtriangleup \epsilon_{nsd}=argmin_v(\nabla f(x)^T\epsilon\mid \|\epsilon\|=1)\)
当我们指定的范数为欧几里得范数时,最速下降法给出的下降方向就是梯度的负方向,即梯度下降法给出的方向。
在wikipedia中说明,梯度下降法也被称为最速下降法(Gradient descent is also known as steepest descent )。
2.牛顿法
如同根据一阶泰勒展开推导出梯度下降法一样,根据二阶泰勒展开可以推导出牛顿优化法(newton’s method in optimization)。将\(f(\mathbf{x})\)在\(\mathbf{x}\)处一阶泰勒展开(tayler expansion),可得到:$$f(x+\epsilon) = f(x)+\epsilon ^T\nabla_x f + \frac{1}{2}\epsilon ^TH\epsilon +O(||\epsilon||^2)\approx f(x)+\epsilon ^T\nabla_x f + \frac{1}{2}\epsilon ^TH\epsilon $$
如果我们将\(x\)看做固定的已知量,将\(f\)看做关于\(\epsilon\)的函数,那么欲求\(f(\epsilon | x)\)的最小值,必要条件(注意:不是冲要条件)是\(\frac{\partial f}{\partial \epsilon}=0\)其中$$H = \begin{bmatrix}\frac{\partial^2f}{\partial x_1 \partial x_1} & \cdots & \frac{\partial^2f}{\partial x_1 \partial x_n} \\ \vdots & \ddots & \vdots \\ \frac{\partial^2f}{\partial x_n \partial x_1} & \cdots & \frac{\partial^2f}{\partial x_n \partial x_n}\end{bmatrix} $$称之为\(f\)的\(Hessian\)矩阵。因为二阶连续混合编导数具备性质$$\frac{\partial^2f}{\partial x_i \partial x_j} = \frac{\partial^2f}{\partial x_j \partial x_i}$$因此\(Hessian\)矩阵为对称矩阵。根据矩阵求导法则,可以得到 $$\frac{\partial f}{\partial \epsilon}={\nabla_x f}^T+\epsilon^TH=0$$$$\epsilon = -H^{-1}{\nabla_x f}$$
可见,牛顿法的思路是将函数f在x处展开为多元二次函数,再通过求解二次函数最小值的方法得到本次迭代的下降方向\(\epsilon\)。那么问题来了,多元二次函数在梯度为0的地方一定存在最小值么?直觉告诉我们是不一定的。以 一元二次函数 \(g(x)=ax^2+bx+c\)为例,我们知道当\(a>0\)时,\(g(x)\)可以取得最小值,否则\(g(x)\)不存在最小值。
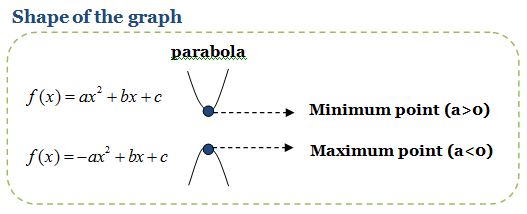
https://perfectmaths.wordpress.com/2011/08/20/chapter-3-%E2%80%93-quadratic-functions/
推广到多元的情况,可以得出二次项矩阵必须是正定(positive definite)的,对应上式即\(Hessian\)为正定矩阵时,函数\(f(\epsilon | x)\)的最小值才存在。
因此,牛顿法首先需要计算\(Hessian\)矩阵并且判断其正定性,当\(Hessian\)矩阵正定,此时其所有特征值均>0,当然\(Hessian\)矩阵也是可逆的,最小值存在。
需要指出的是,当多元函数 f 本身就是二次函数并且存在最小值时,牛顿法可以一步解出最小值。
2.1 牛顿法的优点:
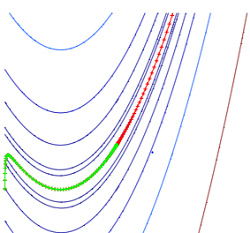
因为目标函数在接近极小值点附近接近二次函数,因此在极小值点附近,牛顿法的收敛速度较梯度下降法快的多。其他文献分析其收敛速度为2次收敛,本文不给出推导。下图是牛顿法应用在Rosenbrock函数上的效果:
2.2 牛顿法的缺点:
1.\(Hessian\)矩阵的计算难度非常的大。因此在高维度应用案例中,通常不会计算\(Hessian\)矩阵。因此牛顿法也产生了很多变种,主要的思想就是采用其他矩阵近似\(Hessian\)矩阵,降低计算复杂度。
2.牛顿法当\(Hessian\)矩阵为正定矩阵时,最小值才存在。牛顿法经常会因为\(Hessian\)矩阵不正定而发散(diverage)。因此 牛顿法并不是非常的稳定。
2.3 牛顿法求根公式与牛顿优化法之间的联系
在说道牛顿优化方法的时候,上过《计算方法》这门课的同学经常会说,牛顿法不是用来求根的么?实际上,牛顿优化法还真可以用牛顿求根法推导得出。我看到的材料是 Andrew Ng在《机器学习课程》中给出的一种推导。在牛顿求根公式中,\(f(x)=0\)的解由迭代式$$x_{i+1}=x_{i}-\frac{f(x_i)}{f\prime(x_i)}$$给出。在牛顿优化法中,我们欲求得梯度\(g(x)=f'(x)=0\)对应的\(x)。
因此 \(x\)可以根据求根公式 $$x_{i+1}=x_{i}-\frac{f\prime(x_i)}{f\prime\prime(x_i)}$$求出。推广到多元函数上,\({1}/{f\prime\prime(x_i)}\)演变为\(H^{-1}\),\(f\prime(x_i)\)演变为\(\nabla_x f(x_i)\)因此$$x_{i+1}=x_{i}-H^{-1}{\nabla_x f(x_i)}$$与根据二阶泰勒展开并求\(f(\epsilon | x)\)的最小值得到的结论一致。
3.参考文献:
1.gradient descent in a nutshell – towardsdatascience.com
2.Newton’s method in Optimization-wikipedia
3.Gradient Descent Method – Rochester Institute of Technology
4.Using Gradient Descent in Optimization and Learning – University Collage London
5.Difference between Gradient Descent method and Steepest Descent – stack exchange
6.In optimization, why is Newton’s method much faster than gradient descent?
一个文科生无意中刷到这个博客,还挺喜欢的。
多谢关注!你是通过什么关键词搜到这个博客的,哈哈
喜欢博主的网站,哈哈哈,请问是什么专业的呀?计算机吗?
感谢!目前职业是程序员,大学专业不是计算机专业,不过有很多相关课程。
最近在搞曲线插值,找了很多方法,还是你这边的方法比较好。还有在更新吗?也是做几何相关的算法工作吗?
在做,近两年工作福报修的比较多==,考虑21年开始继续进行更新。
剛好在學convex optimization, 您的文章幫助很大,謝謝!
很高兴能对你有帮助!
看到whu感觉是校友,很喜欢“高斯牛顿”、“梯度下降”这两篇文章,点赞!
谢谢校友,哈哈
刚好在做非线性拟合,这两篇文章太好了!!感谢!!
请问latex不能正常加载是怎么回事呢
尝试多刷新下,或者搜索”wordpress latex加载“
目前见过思路最清晰的牛顿法讲解
谢谢,很清楚